Received a monetary prize and got selected for a 10min spotlight presentation! Thanks very much to the organizers of the Differential Robotics Workshop at IROS 23.
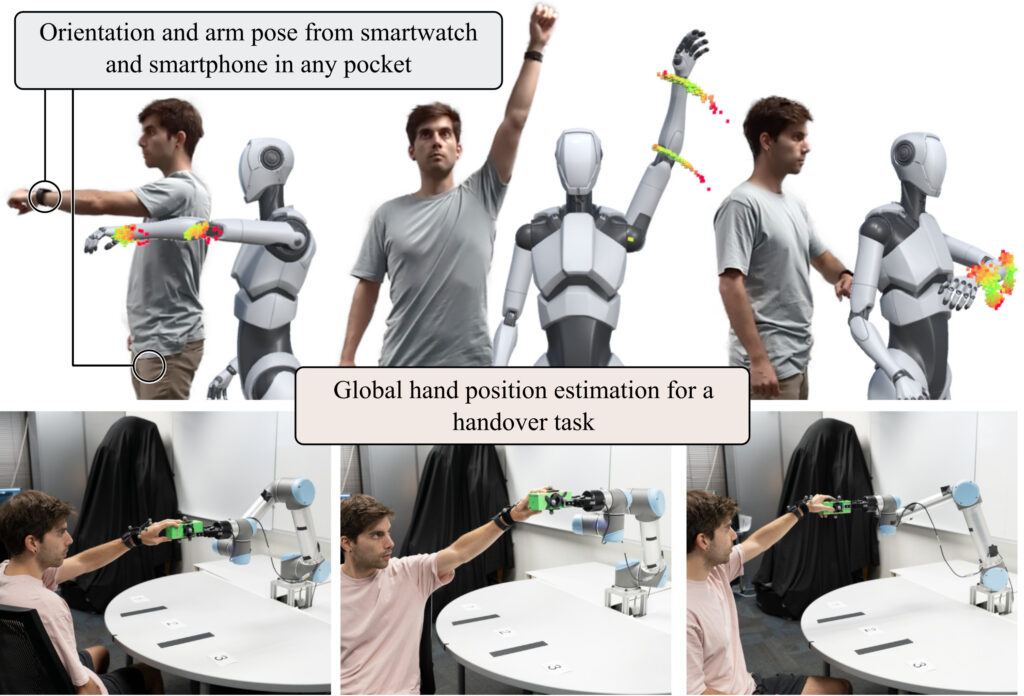
Ubiquitous robot control and human-robot collaboration using smart devices poses a challenging problem primarily due to strict accuracy requirements and sparse information. This paper presents a novel approach that incorporates a probabilistic differentiable filter, specifically the Differentiable Ensemble Kalman Filter (DEnKF), to facilitate robot control solely using Inertial Measurement Units (IMUs) from a smartwatch and a smartphone. The implemented system is cost-effective and achieves accurate estimation of the human pose state. Experiment results from human-robot handover tasks underscore that smart devices allow versatile and ubiquitous robot control. The code for this paper is available at www.github.com/ir-lab/DEnKF and www.github.com/wearable-motion-capture.